Title here
Summary here
January 26, 2022 in Aerospace, Programming by ![]() Dhulkarnayn—6 minutes
Dhulkarnayn—6 minutes
Navigating a drone through the skies is akin to orchestrating a symphony of technology, and at the heart of this harmonious dance is the marvel of navigation systems. Picture a drone as a modern-day adventurer equipped with an ensemble of sensors, each playing a crucial role in steering it across the vast landscapes.
Among these technological maestros, the Global Positioning System (GPS) receiver stands out as a virtuoso. Nestled onboard every outdoor-bound drone, the GPS receiver, part of the User Segment, performs a captivating act. It taps into a cosmic ballet with GPS Satellites, receiving their signals and translating them into a mesmerizing display of latitude and longitude values.
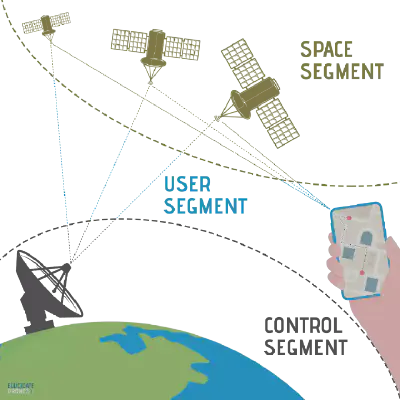
Image Credits: Dhulkarnayn, Elucidate Drones
These latitude and longitude coordinates, the secret language of locations, join forces to form what we fondly call geographical coordinates or GPS coordinates. It’s as if the drone speaks the Earth’s own dialect, allowing us to pinpoint its exact whereabouts with ease.
Note
Dive deeper into the orchestration of drone navigation by exploring the intricate interplay between drones and GPS in our dedicated article:
So, you’ve got your hands on a drone, and now you’re ready to dive into the fascinating world of navigating it across the skies. The key to this aerial odyssey lies in deciphering the mystical language of MAVLink and wielding the power of DroneKit-Python.
Picture this: Your drone, a digital voyager, is waiting for your commands. Before we unleash its potential, let’s establish a connection. Meet the protagonist of our story, the vehicle object, the gateway to your drone’s inner workings. Depending on your choice, you might name it drone, quadcopter, or perhaps, something even more whimsical.
drone = dronekit.connect('udpin:127.0.0.1:14551', baud=115200)With the stage set, let’s unveil the script that will cast a spotlight on your drone’s whereabouts.
Behold, the magical script named geo_coords.py – a script that will unravel the geographical coordinates of your airborne companion. Feel free to clone the script’s repository if you’re feeling tech-savvy!
1#!/usr/bin/env python
2
3#..................................................................................
4# Author : Saiffullah Sabir Mohamed
5# Github : https://github.com/TechnicalVillager
6# Website : http://technicalvillager.github.io/
7# Source : https://github.com/TechnicalVillager/geo-coords-dronekit/
8#..................................................................................
9
10# Import Necessary Packages
11from dronekit import connect
12
13# Connecting the Vehicle
14vehicle = connect('udpin:127.0.0.1:14551', baud=115200)
15
16# Printing Vehicle's Latitude
17print("Vehicle's Latitude = ", vehicle.location.global_relative_frame.lat)
18
19# Printing Vehicle's Longitude
20print("Vehicle's Longitude = ", vehicle.location.global_relative_frame.lon)Source: Link
The moment has arrived! Execute the script on your terminal with the following command:
python geo_coords.pyAnd there it is – the grand reveal! Feast your eyes on the geographical coordinates, painting a vivid picture of your drone’s location in the vast canvas of the skies.
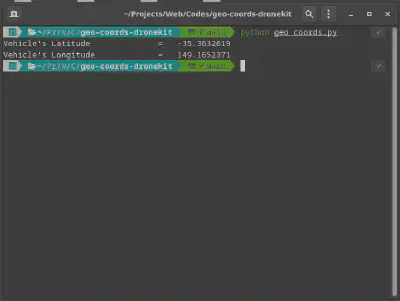
Image Credits: Dhulkarnayn, Elucidate Drones
Note
Dive into the world of simulated flight with ArduPilot’s Software In The Loop (SITL) simulation and the Mission Planner, your Ground Control Station (GCS) accomplice. It’s a symphony of technology, and you’re the maestro orchestrating the drone’s journey. For Linux and Mac OS enthusiasts, fear not – you can run Mission Planner with Mono.
Welcome to the next leg of our drone expedition – where we unravel the secrets of your drone’s altitude. Brace yourself as we delve into the code, unlocking not just the height, but a trifecta of data – altitude, latitude, and longitude.
In this act, the spotlight is on the geo_coords_alt.py script, a magical piece of code that orchestrates the revelation of your drone’s altitude. If you’ve been following our journey and cloned the repository, you’re already in possession of this enchanting script.
Feel the anticipation building? Let’s explore the script together.
1#!/usr/bin/env python
2
3#..................................................................................
4# Author : Saiffullah Sabir Mohamed
5# Github : https://github.com/TechnicalVillager
6# Website : http://technicalvillager.github.io/
7# Source : https://github.com/TechnicalVillager/geo-coords-dronekit/
8#..................................................................................
9
10# Import Necessary Packages
11from dronekit import connect
12
13# Connecting the Vehicle
14vehicle = connect('udpin:127.0.0.1:14551', baud=115200)
15
16# Printing Vehicle's Latitude
17print("Vehicle's Latitude = ", vehicle.location.global_relative_frame.lat)
18
19# Printing Vehicle's Longitude
20print("Vehicle's Longitude = ", vehicle.location.global_relative_frame.lon)
21
22# Printing Vehicle's Altitude
23print("Vehicle's Altitude (in meters) = ", vehicle.location.global_relative_frame.alt)Source: Link
The time has come to execute this script and witness the spectacle. Open your terminal and let the magic unfold:
python geo_coords_alt.pyBehold the result – not just the altitude but a fusion of coordinates, creating a visual symphony of your drone’s location.
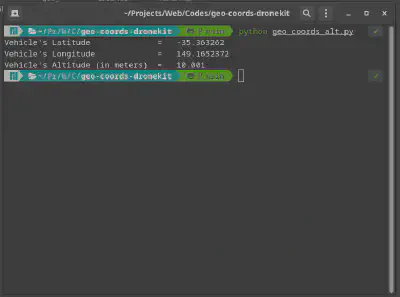
Image Credits: Dhulkarnayn, Elucidate Drones
Note
Immerse yourself in the world of simulated flight using ArduPilot’s Software In The Loop (SITL) simulation and let the Mission Planner be your guide through the digital skies.
Our journey continues as we turn our attention to the heading angle of your drone. This angle, much like a compass, guides your drone through the ever-expanding digital landscape. Let’s explore the script geo_coords_w_heading.py together.
If you’ve been captivated by our journey and cloned the repository, you’re just a step away from unlocking the heading angle script.
1#!/usr/bin/env python
2
3#..................................................................................
4# Author : Saiffullah Sabir Mohamed
5# Github : https://github.com/TechnicalVillager
6# Website : http://technicalvillager.github.io/
7# Source : https://github.com/TechnicalVillager/geo-coords-dronekit/
8#..................................................................................
9
10# Import Necessary Packages
11from dronekit import connect
12
13# Connecting the Vehicle
14vehicle = connect('udpin:127.0.0.1:14551', baud=115200)
15
16# Printing Vehicle's Latitude
17print("Vehicle's Latitude = ", vehicle.location.global_relative_frame.lat)
18
19# Printing Vehicle's Longitude
20print("Vehicle's Longitude = ", vehicle.location.global_relative_frame.lon)
21
22# Printing Vehicle's Altitude
23print("Vehicle's Altitude (in meters) = ", vehicle.location.global_relative_frame.alt)
24
25# Printing Vehicle's Heading Angle
26print("Vehicle's Heading = ", vehicle.heading)Source: Link
Prepare for the grand reveal! Execute the script and let the heading angle unfold before you:
python geo_coords_w_heading.pyWitness not just the heading angle but a symphony of data – latitude, longitude, altitude – guiding your drone through the digital expanse.
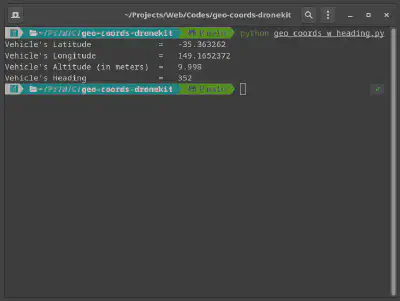
Image Credits: Dhulkarnayn, Elucidate Drones
Note
Embark on the journey of simulated flight with ArduPilot’s Software In The Loop (SITL) simulation. For Linux enthusiasts, learn how to set up ArduPilot SITL on your machine – the gateway to digital skies. Explore more: How to set up ArduPilot SITL on Linux?
Congratulations on mastering the essentials of retrieving crucial data from your drone using DroneKit-Python! 🚀 Now that you have the GPS coordinates, altitude, and heading angle at your fingertips, the sky’s the limit for your drone programming adventures.
I’m eager to hear about your experiences and any exciting projects you embark on using this knowledge. Feel free to share your thoughts, questions, or suggestions in the comments section below. Your input might spark a collaborative discussion or inspire others in the drone programming community!
Remember, continuous learning and sharing are key to pushing the boundaries of what drones can achieve through code. If you found this guide helpful, don’t keep it to yourself—share it with fellow enthusiasts and let’s elevate the world of drone programming together.
Thank you for joining me on this coding journey. Happy coding, and may your drones soar to new heights! 🛰️💻
This post is licensed under Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0) by the author.
Please consider supporting this project!
If this article has been of help to you, and you feel generous at the moment, don’t hesitate to buy us a coffee. It's an easy, fun and direct way to show your support — any amount of coffee is highly appreciated.